Prototyping
While the strategy team continues to decide what needs to be built, we decided to start with some VERY basic prototyping to help everyone start to visualize manipulator, field, and game piece interactions. We’ve found that especially with new members, staring at a white board to discuss how “hard/easy” something is for a Weighted Objective Table, can be counter-productive. Hands-on-prototyping helps them understand the questions and provides them with more experience to contribute to the “talking part” of robot design.
We made a basic TODO list for the day on our season Trello (and then edited them at the end of the day with results).
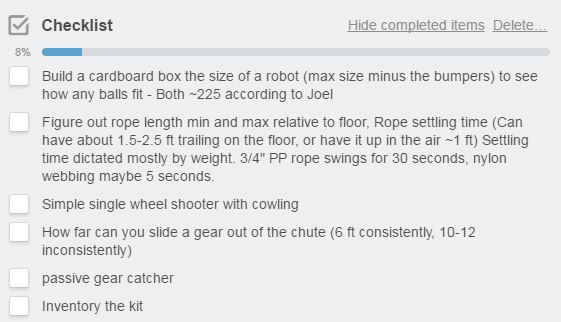
A reasonable upper limit on fuel storage (assuming just a driving box) is ~225. This means that an alliance of 3 driving boxes could hold the entire field of fuel as a chokehold. Two robots, plus the ~150 that can be stored in the boiler bins before overflow, can come pretty close as well.
Rope continues to be a hotly debated topic, specifically regarding the use of Velcro. The action of climbing is relatively simple this year (winch), whereas the acquisition may be the slightly tougher challenge. Either way, it is significant easier than last year’s climbing challenge, as the robot height/climb point is more friendly, you can acquire the rope at ground level, and you can choose the rope. We did some basic testing on settling time (heavier ropes off the ground will swing for 30 seconds), and some quick math to determine if we could have the rope not touching the ground (yes).
Despite initial strategy discussions leaning towards gear over shooting fuel, if we can comfortably pull off gear and shooter without sacrificing our ability to get three rotors spinning (6 gears scored), we feel it adds flexibility to achieve a 3rd rank point in SOME matches, whereas a 3rd rank point on rotors in a qualification match seems less reasonable. Unfortunately, our team has almost zero successful experience trying to build a wheeled shooter. We know that surface speed of the wheel translates into shot distance, time in contact with the cowl, cowl material/texture, wheel shape/texture, feed rate, and many other variables all play a role in the shooter. At this point, we’re just taking our best guess, and seeing if we can get something promising… then decide next week whether we can optimize it to be worth pursuing, or drop it completely.
Finally, we did a little work trying to slide out the gears from the retrieval zone. If we opted for a floor pickup, we could shorten our cycle time by getting the gear further out in the field. Quick results… 6 ft is reasonable, up to 10-15ft (which would hit the airship on our side) occasionally.
Here’s a video that probably explains a lot of what we did better than my words.
Awards
As many members are new, we did have a recap of the awards available to our team, as well as the fact that many require a written submission that is due before competition. A few students will be splitting off to run awards (in addition to contributing on build).
Metal Donation
We have been fortunate to have Regal Plastic as a sponsor, and their scrap Lexan supply has sustained most of our prototyping and laser cutting projects for free. We’ve also been able to sort and distribute plastic to several other teams in the area.
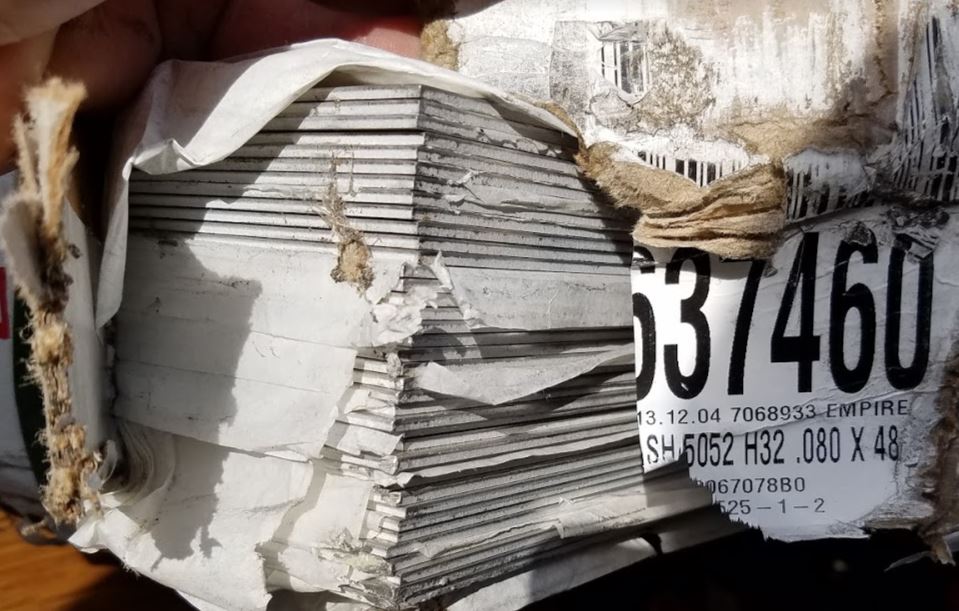
This year, we got a surprise donation by a local metal processing business. They were able to donate 40 sheets (4×6 ft each) of 0.08″ thick 5052 aluminum, which would roughly cost us $3000 to purchase new. As it was far in excess of our season needs, we have already begun distributing the majority of it out to other teams in the area. 21/40 donated so far, including 2 rookie teams.