Stu-Bots
I arrived home late Wednesday night to my concerned wife wondering “what the heck I ordered”… which can only mean… game pieces are here!

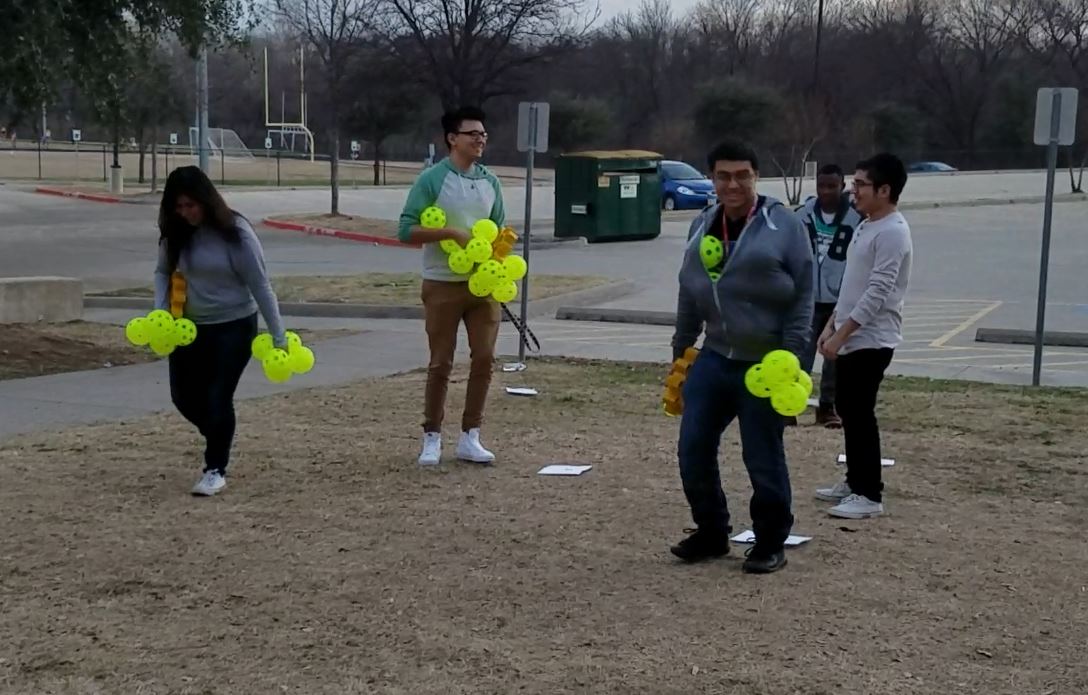
With game pieces, we could now play “stu-bots” or “student robots”. This exercise is always valuable for being able to visualize how the game will flow. It also gives us a basis of comparison, humans are much better at some things than robots (fine manipulations, hands are awesome), but worse in others (carrying 200 balls at a time, or shooting at a very high rate of fire).
Key take-a-ways:
- Moving at a consistent ~5ft/sec led to an actual cycles/match of ~4-5. Defense in the middle zone was quite effective.
- Humans that could only carry ~10-15 balls, scoring maybe 75% in the high goal, led to ~20-25kpa a match. They were mostly cycling to the retrieval zone. Collection from hoppers/floor and a holding capacity of 30-40 will likely change the equation, but anything over 50 or so will have diminishing returns from a scoring capacity, as a 3-5 fuel/sec shooter will have to sit for 10-15 seconds shooting. Teams that are able to achieve a higher rate of fire (multiple shooters?) will be able to justify larger volumes, and we’ll probably see multiple shooters at Einstein level teams.
- We need more data. But playing stu-bots is fun 🙂
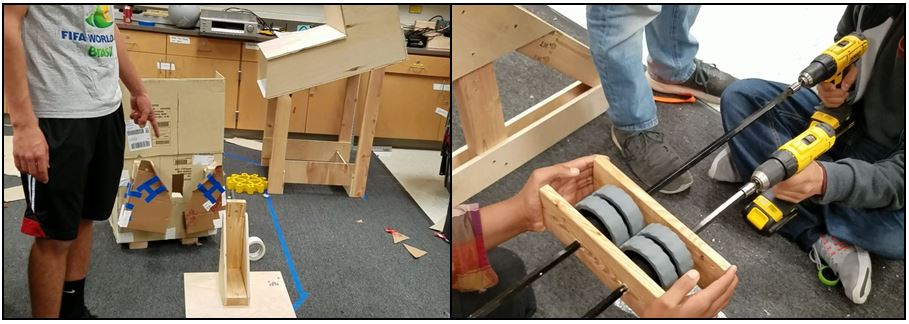
Prototyping Continued
Despite being a little slower day, we were able to advance a couple other prototype designs.
- We’d like to know what a passive gear manipulator could do, so we started a basic design that could be mounted to a kit chassis. While it might not be OUR design, it gives us information on what to expect from the bottom tier of robots at a competition. If they can get 2 gears each, or be modified to do so, it makes our incremental contribution a lot less as a pure gear robot.
- Additionally, we know climbing is a must do, but had yet to build a prototype. We played a bit with a “direct rope climb” idea today, building up a simple wooden prototype and driving it with a drill. It had a few issues with either stalling the motor, or being too loose and slipping, as well as no clear way to engage the rope to start the climb, but every bit of information helps.
- We’ll likely work to advance both passive gear and climbing forward (with all other prototypes) on Saturday when we will have far more people and 8 hours to build instead of ~2.