
More Prototyping
After roughly a week of prototyping, we unfortunately had questions coming in at the rate of answers.
- Can we build an effective shooter, despite relatively little team experience, by using online resources to get close and then dial it in?
- Will a roller or belted intake function properly this year with our preferred over-bumper design?
- If we go over bumper, will a 36″ bot get too tippy as our wheelbase shrinks to almost 12-15″? Should we move to a 24″ limit and just sacrifice volume (because we don’t want to go max width/length)
- We know we can pickup a gear, we know we can place a gear, but can we do this in a space efficient way to allow room for a reasonable hopper (30-40 balls?) and shooter?
- What does this hopper design look like? Designing a hopper that shakes a ball out every now and then isn’t an issue. Designing a hopper that can feed balls out at 2-4 ft/sec (~3-5 balls per second) without jamming… is a non-trivial engineering challenge.
We did get a little data this week though.
Shooter
We built an “upgraded” shooter prototype with dual rails to support the ball, thinking we could get better control over the compression. In actuality, we ended up with a ridiculous amount of backspin and very little control. We also upgraded our controls to be a battery, with a Spark + attached PWM signal generator, to start setting the RPM on the shot. We also ordered a 4″ neoprene roller shooter wheel that we’ll test this weekend.

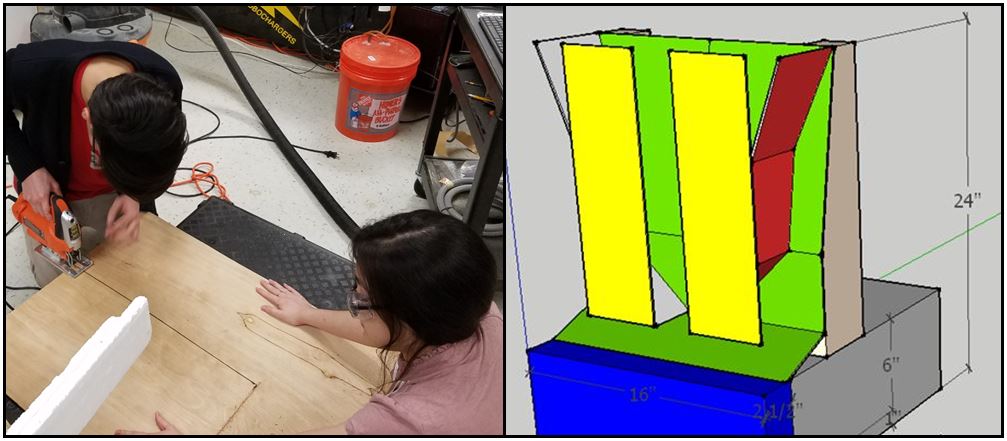
Passive Gear Manipulator
Progress continued on our passive gear manipulator, which we expect to have for Rev 0.5 of the robot in the next week or so (full drivetrain with prototype manipulators). We are both working on improving the existing prototype as well as CAD on a new one.
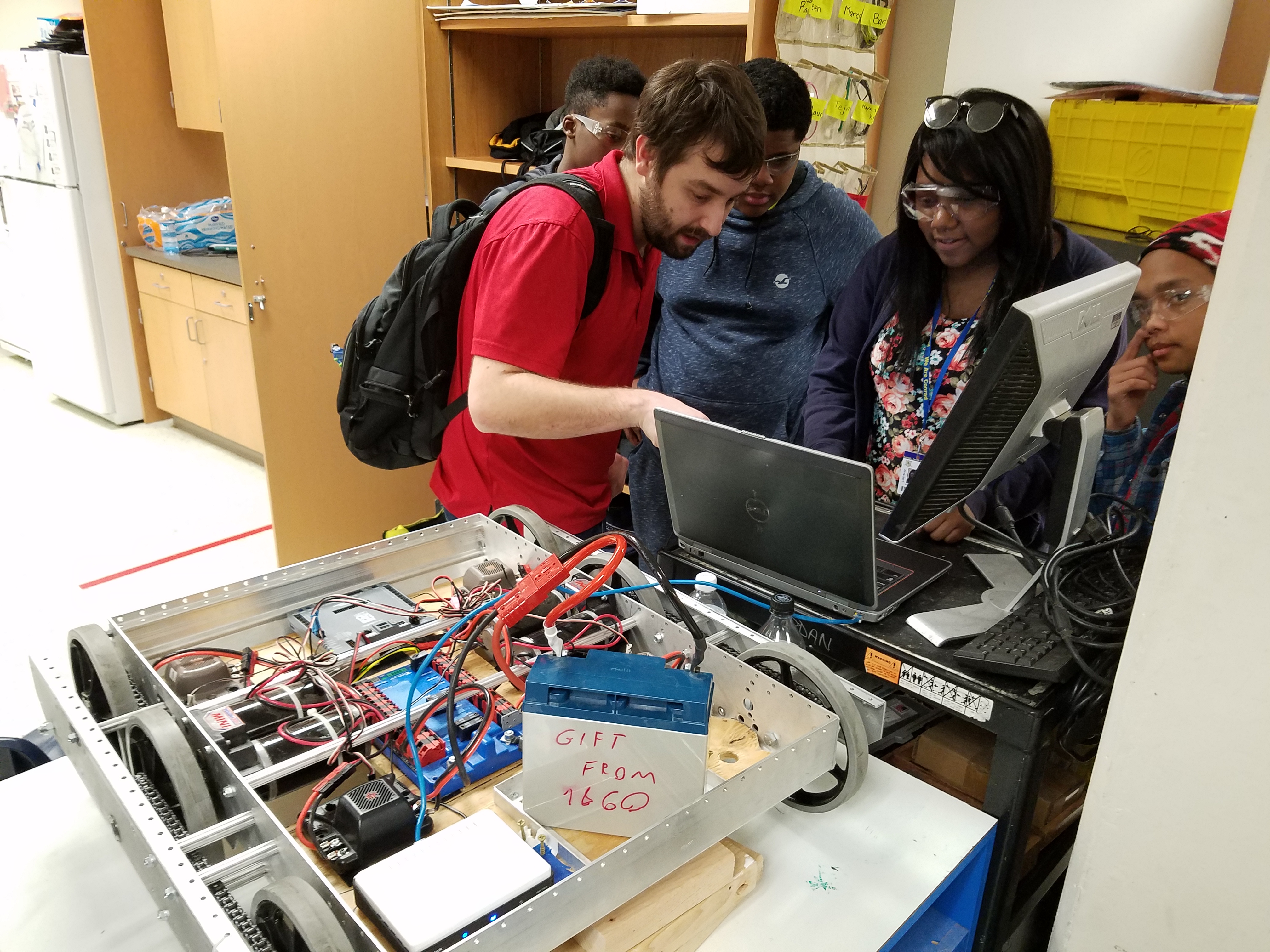
Outreach
Finally, we were able to start opening up our shop to help rookies in the area. We know FRC can be intimidating for new teams, and it wasn’t too long ago we were basically at a rookie skill level. Garland High School – FRC6687 – Owltronics has a strong group of teachers and students mechanically, but needed a little help doing the initial programming of their robot. Our programmers were happy to assist, and got them going on an XBox controller as well.
Next Steps
- Planning on ~3 robot revisions this year for the actual build season
- 0.5 which is a fully functional drivetrain, with basically MDF prototypes affixed to it (~Week 3)
- Plan to build 2 copies simultaneously to give programmers a good base for auton testing
- 1 – Which is equivalent to our “practice bot”, completed 10-14 days before bag/tag
- Bagged Bot – Preferable… function tested before bagging 🙂
- And then convert practice bot to bagged robot, or rebuild a 2nd “final rev” to continue testing
- 0.5 which is a fully functional drivetrain, with basically MDF prototypes affixed to it (~Week 3)
- Rest of the week
- Shooter prototype Rev 2 and design experiment to test multiple variables
- Passive gear scoring prototype ready for 0.5 Bot
- Finish CAD on drivetrain and gearboxes to cut this weekend
- Rev 1 prototypes on Hopper and Fuel Intake